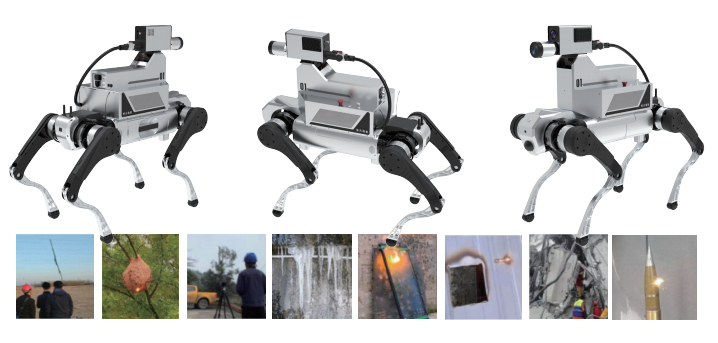
Laser breaking quadruped robot
After the disaster search and rescue demolition:At the scene of disasters such as earthquakes and explosions, quickly enter dangerous areas, perform doors and windows demolition, obstacle removal tasks, and open up rescue channels.
Operation in hazardous chemical environment:In emergency environments such as fires and gas leaks, it replaces firefighters to perform high-risk demolition operations, transmit real-time data, and assess risks.
Removal of high risk equipment:in metallurgy, electric power and other industries, instead of manual access to high-temperature, high-risk environment, the implementation of specific equipment components of precise removal operations.
Complex space operations:uses its flexible shape to enter narrow spaces, underground pipe corridors and other areas that are difficult to reach by traditional equipment to complete local demolition tasks.
| Loading System | Ontology Performance | |||
| Laser output power | 600W | Weight | 64±1kg | |
| Wavelength | 1080nm | Load capacity | load capacity ≥ 50kg | |
| Battery life | about 30min | Load capacity | Maximum load ≥ 100kg | |
| Battery Capacity | 48 V20Ah | Maximum running speed | 3.5m/s | |
| Focusing spot ability | ≤ 5mm @ 100m | Maximum climbing angle | 30 ° | |
| Host weight | about 15Kg | Protection level | IP67 | |
| Farthest distance | 350 m (cleaning floating objects) | Continuous stair height | 30cm | |
| Cutting efficiency | 10cm diameter trunk for 3-5 minutes | Operating environment temperature | -20~55 ℃ | |
| Focus lens aperture | 65mm | Load Endurance | 2.5-5.5h |